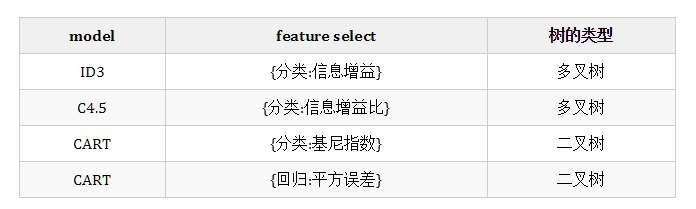
决策树是一个非常常见并且优秀的机器学习算法,它易于理解、可解释性强,其可作为分类算法,也可用于回归模型。基本算法有 ID3、C4.5、CART。
Overview
ID3算法(Iterative Dichotomiser 3 迭代二叉树3代)是一个由 Ross Quinlan 发明的用于决策树的算法。
这个算法是建立在奥卡姆剃刀的基础上:越是小型的决策树越优于大的决策树(简单理论)。(尽管如此,该算法也不是总是生成最小的树形结构。)
奥卡姆剃刀(英语:Occam’s Razor, Ockham’s Razor),又称“奥坎的剃刀”,拉丁文为lex parsimoniae,意思是简约之法则,是由14世纪逻辑学家、圣方济各会修士奥卡姆的威廉(William of Occam,约1287年至1347年,奥卡姆(Ockham)位于英格兰的萨里郡)提出的一个解决问题的法则,他在《箴言书注》2卷15题说“切勿浪费较多东西,去做‘用较少的东西,同样可以做好的事情’。
信息熵越大,从而样本纯度越低。
ID3 算法的核心思想就是以信息增益来度量特征选择,选择信息增益最大的特征进行分裂。算法采用自顶向下的贪婪搜索遍历可能的决策树空间(C4.5 也是贪婪搜索)。
贪心算法(英语:greedy algorithm),又称贪婪算法,是一种在每一步选择中都采取在当前状态下最好或最优(即最有利)的选择,从而希望导致结果是最好或最优的算法。比如在旅行推销员问题中,如果旅行员每次都选择最近的城市,那这就是一种贪心算法。
- 贪婪算法